
КЕЙС
Компьютерное зрение для дронов
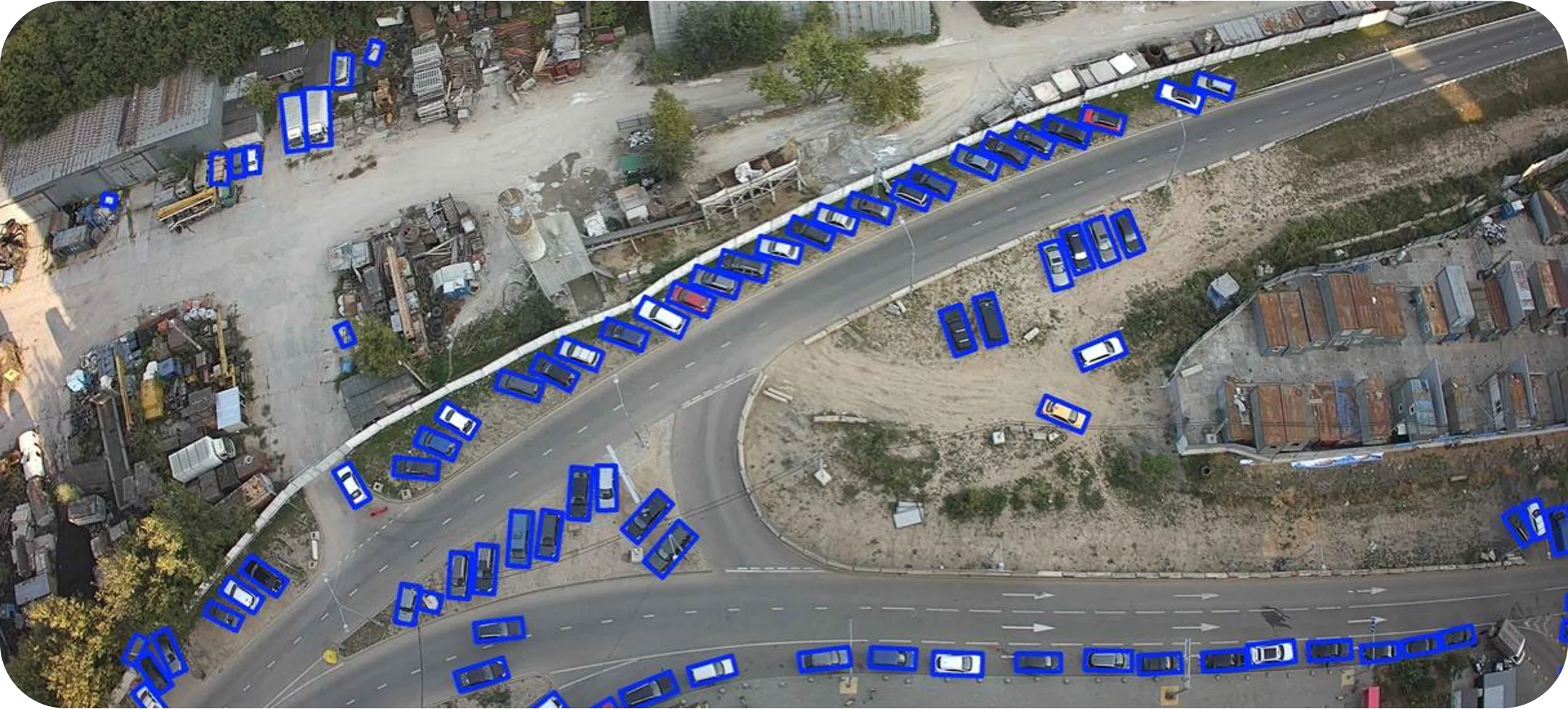
Система компьютерного зрения для распознавания и сопровождения объектов в реальном времени в БПЛА-сценариях. О решении
Описание
Система компьютерного зрения для автономного распознавания и трекинга объектов в реальном времени при работе с БПЛА. Решение применяется как на борту дрона, так и на наземной станции управления, поддерживает работу с видеопотоками RGB и IR и адаптировано к ограничениям по вычислительным ресурсам и задержкам передачи данных.
Отрасль БПЛА / безопасность / мониторинг
Тип решения Система компьютерного зрения
Среда Борт БПЛА + наземная станция
Проектирование под реальные условия эксплуатации
Боль
Нестабильные условия съёмки (освещение, погода, углы обзора) снижают качество детекции
Вибрации и динамика полёта осложняют устойчивое сопровождение объектов
Ограниченные вычислительные ресурсы на борту требуют жёсткой оптимизации алгоритмов
Динамично меняющиеся реалии и бизнес требования для задач с БПЛА
Задача
Real-time детекция и классификация объектов в RGB и ИК диапазонах
Устойчивый трекинг объектов при вибрациях и активном движении платформы
Работа как на борту БПЛА, так и на наземной станции управления
Масштабируемость под новые сценарии и классы объектов
подход
От данных — к работающему решению
Система разрабатывалась для бортовой эксплуатации БПЛА — с ограничениями по latency, углам обзора и вычислительным ресурсам.
1
Анализ входных данных
Анализ входных данных Анализ видеопотоков с БПЛА (RGB и ИК), оценка условий эксплуатации, ограничений по latency и вычислительным ресурсам. 2
Разработка CV-моделей
Разработка CV-моделейОбучение и оптимизация моделей детекции, классификации и трекинга объектов.Поддержка различных классов: люди, техника, стационарные объекты.
3
Интеграция и тестирование
Интеграция и тестированиеИнтеграция решения на борт (Rockchip / Nvidia Jetson) и в НСУ.Тестирование устойчивости в реальных сценариях полёта.
реализация
Что сделано
Реализована система компьютерного зрения для бортовой эксплуатации БПЛА, включающая:
- Детекцию и классификацию объектов в реальном времени
- Устойчивый трекинг целей при движении и вибрациях платформы
- Обработку видеопотоков в RGB и ИК диапазонах
- Оптимизацию под ограниченные вычислительные ресурсы и требования по latency
- Интеграцию с бортовыми вычислителями и наземной станцией управления
- Поддержку автономных и полуавтономных сценариев работы
результат
Система в реальной эксплуатации
Система проходит обкатку в реальных сценариях и уже используется как инструмент поддержки оператора.
ОБРАБОТКА
Работа с живыми видеопотоками Real-time CV
Стабильность
Устойчивые алгоритмы RGB / IR
Масштаб
Готовность к расширению Edge → Ground
Есть задача или нестандартные условия?
Коротко опишите сценарий — мы оценим подход и предложим варианты реализации.